

证券代码:832885 投资者关系

由于齿轮传动间隙的必然存在,在高精度、高频度的往复运动机构中,齿轮间隙会随着使用时间的增加而逐渐增加。逐步增加的传动间隙会成为影响系统可靠性和实现高速、精确定位的最大障碍。
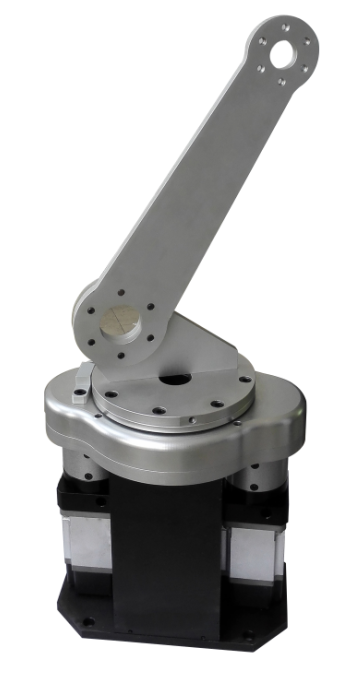
“消隙第一关节”采用双电机消隙技术,由两个电机分别驱动两个传动链并最终控制同一对象,如机器人的第一关节,实现无间隙驱动定位。该技术对齿轮精度要求大为降低,而往复运动频度和精度却显著提升。

Copyright © 2017 桂林星辰科技股份有限公司 版权所有 桂ICP备17007001号-1 ![]() 桂公网安备45030502000931号
桂公网安备45030502000931号